
















CS機器人E12S903報警處理
1. 簡介
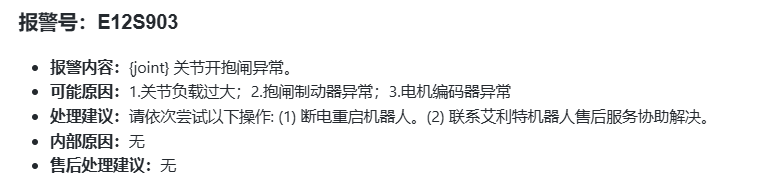
E12S903:{joint} 關節開抱閘異常
1. E代表:大的報警類別,S代表:內部的小類別
2. 12代表:伺服報警
3. 903代表:{joint} 關節開抱閘異常(如下圖)
2. 導致故障發生的原因
1. 關節負載過大:
● 可能的原因(1):故障姿態下關節受力較大 或者關節活動范圍受限(碰撞了)
● 可能的原因(2):負載較重,在某些位姿下會卡死
2. 抱閘制動器異常
● 可能的原因:電磁抱閘/電磁鐵異常或卡死
3. 電機編碼器異常
● 報故障時,通常臂體有劇烈振動。使用“反向驅動”推動到新位置后,再次嘗試開抱閘,故障依舊
4. 霍爾信號異常,但是硬件無法檢測出錯誤
注:已出現的問題基本為第4種原因
3. 排查方向及處理方式
1. 關節負載過大處理方式:
● 先啟用“反向驅動”,將臂體推動到新的位置,再嘗試開抱閘。
2. 檢測抱閘制動器是否存在異常
● 先啟用“反向驅動”,將臂體推動到新的位置,再嘗試開抱閘。
● 電磁鐵抱閘結構:檢測電磁鐵本身是否存在機械變形或卡死(肉眼觀察)
● 電磁抱閘結構:觀察電磁抱閘是否打開或者是否存在異常現象(看不到開抱閘的實際狀況)
處理方式:返廠或現場更換關節
3. 檢測電機編碼器是否存在異常
● 產測模式下,強制上電,推動關節,檢查對應關節0X67的值是否有變化(部分有用)
導致原因(1):INC排線損壞
導致原因(2):INC組件異常
處理方式:返廠或現場更換關節
4. 霍爾信號異常
● 測量方式:本體上電,拍急停,使用萬用表測量霍爾線中間三根線與外殼之間的電壓(正常情況下,三根線的電壓值是不一致的,不會同時存在三個0V或者3.3V,故如三個電壓一致則為異常,反之OK。(電平信號:0和1)。
屏蔽方式:
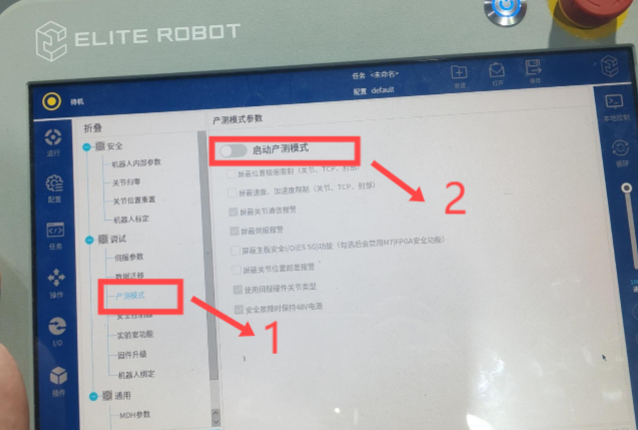
● 進入專家模式,選擇”產測模式” ,并點擊”啟動產測模式”,如下圖。
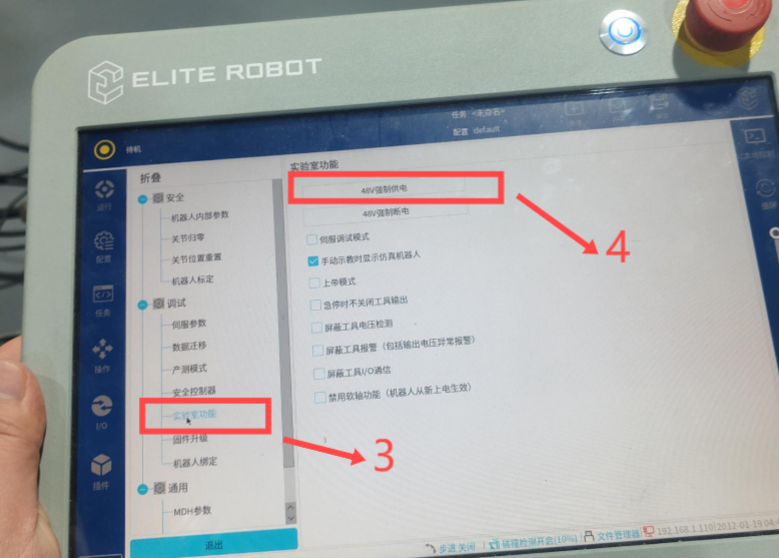
● 選擇“實驗室功能”,并點擊“48V強制供電”,如下圖。
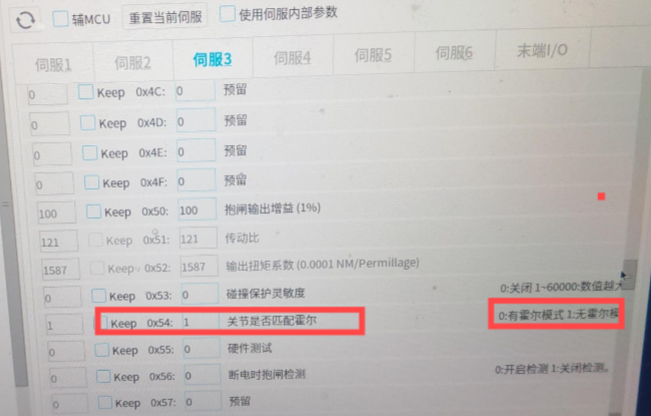
● 找到對應的關節,屏蔽0x54=1(0:有霍爾,1:無霍爾),0X03修改為5保存。
處理方式:
現場處理方式:更換故障關節或屏蔽霍爾
返廠維修


























