
















CS機器人不運動排查方法
2025-09-09
1. 簡介
在客戶日常操作中,經常會遇到機器人不動作的情況,這邊文檔主要用于排查不動作原因方便客戶日常使用。
2. 操作流程
1. 查看左上角運行狀態。
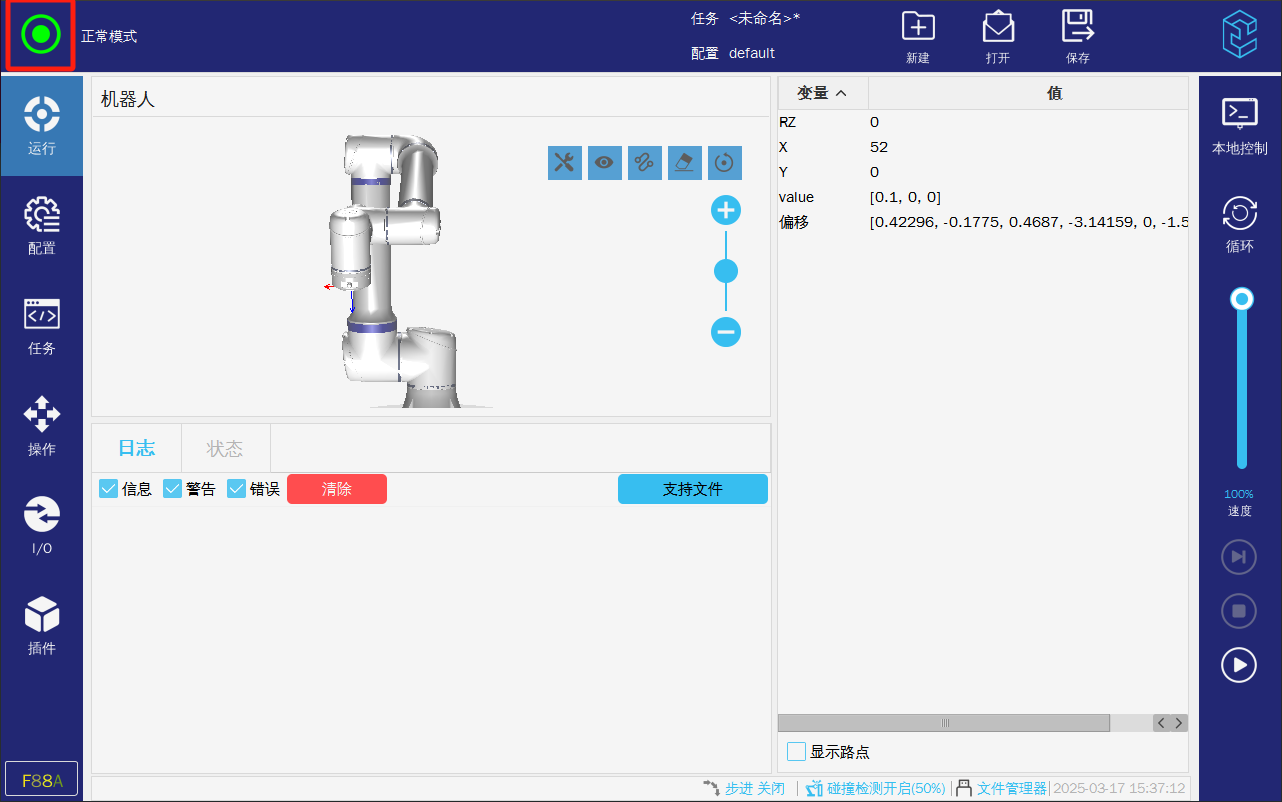
1. 可以先根據顏色確認機器人是正常狀態(綠色;正常狀態,黃色;未釋放抱閘/保護性停止,紅色;報警/“關閉電源“狀態)
需要確保機器人是處于”綠色狀態“


2.運行模式,如果是正常模式則需要讓任務運行(左上角處于“運行中“),則機器人才會根據任務來執行需要動作。
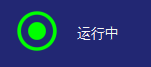
2. 查看程序指針。
在處于任務運行中的時候機器人如果沒有任何動作也無報警可以查看對應任務的程序指針,通過指針查看當前程序執行在哪一行(比如以上程序目前是在處于等待指令行),由此來判斷不動作的原因。位置1是程序指針,如果找不到位置1的程序指針,可以點擊位置2,該位置是表示跟蹤到程序指針位置1.
如
3. 查看是否添加斷點
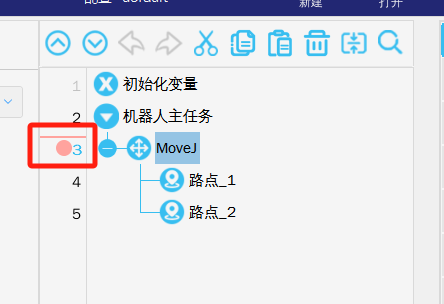
如果不小心添加添加了斷點,則可以在點擊一下斷點圖片位置把斷點取消叫就可以運行了。
4. 查看系統配置或IO高級插件配置的暫停,停止信號。
4.1. IO輸入輸出

圖1-1
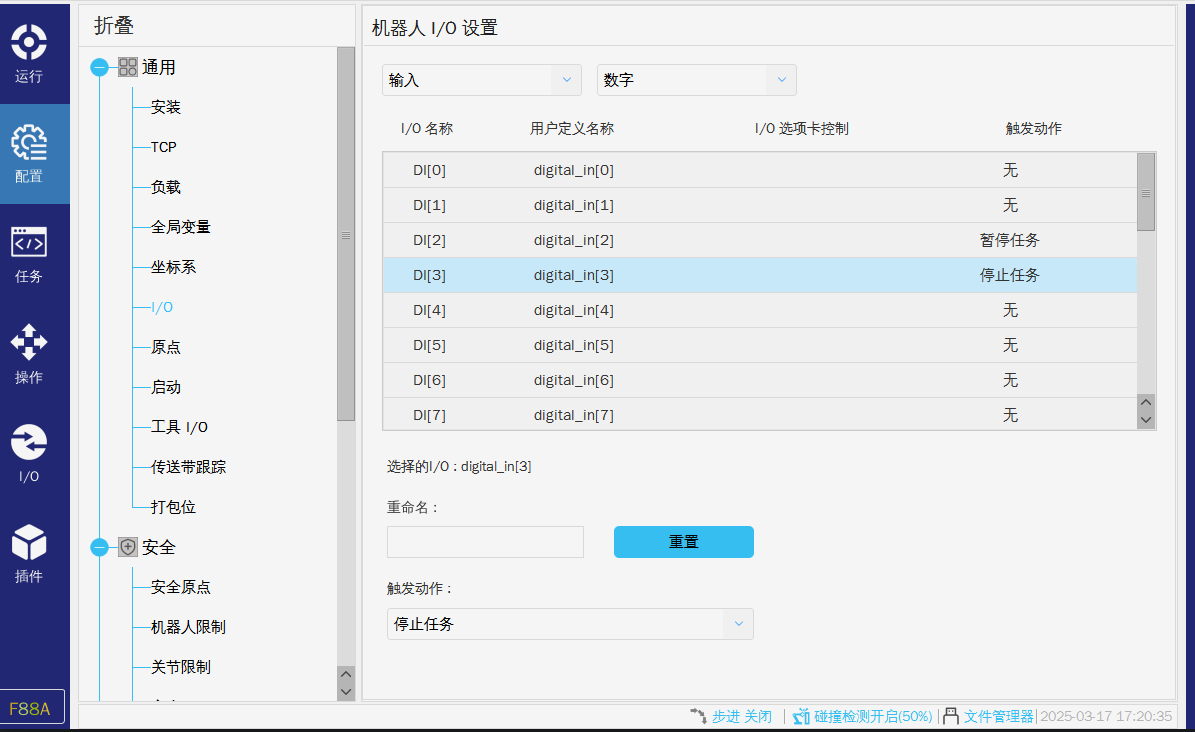
圖1-2
在使用硬接線的交互方式時,運行過程中如果無故暫停或者停止,可以查看以上兩張圖片是否有配置導致任務停止或者暫停。
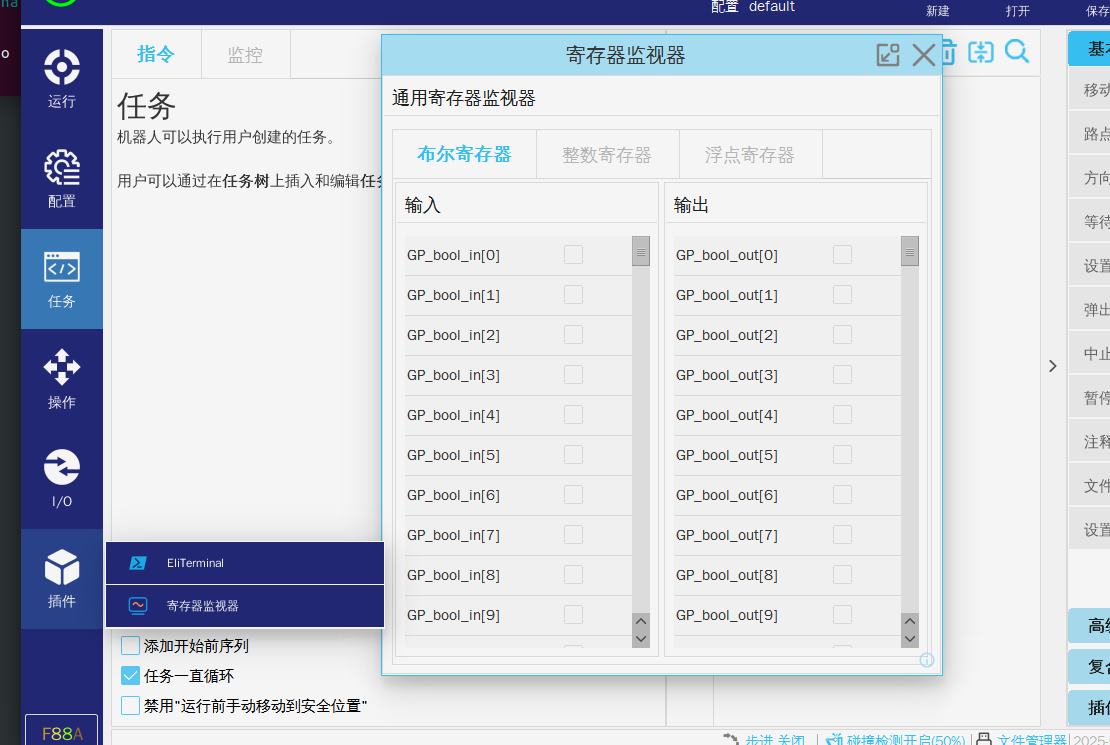
4.2. 布爾寄存器

圖1-1
在使用寄存器做交互的時候,運行過程中如果無故暫停或者停止,可以查看以上圖片是否有配置導致任務停止或者暫停。
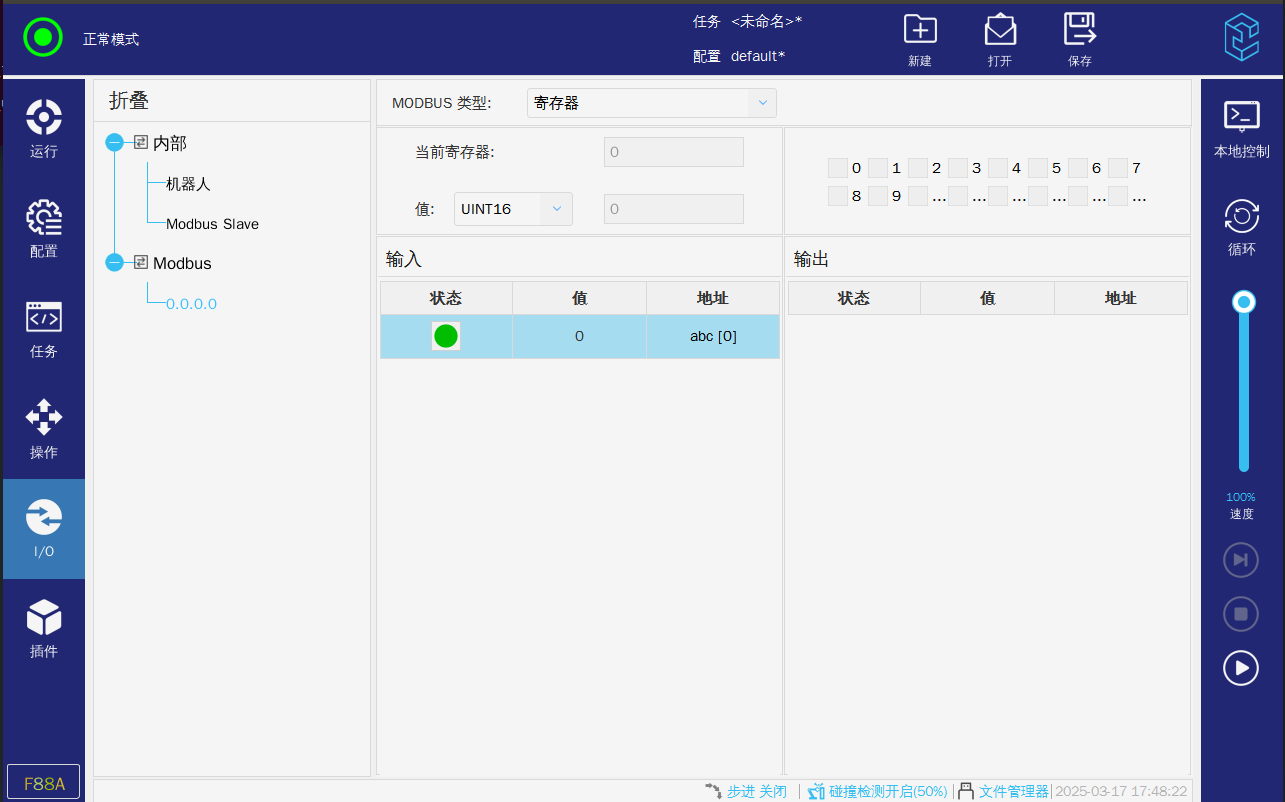
5. 查看IO信號,modbus,通用寄存器信號。

2-1-機器人接線-IO信號

2-2-modbus從站
2-3modbus主站
2-4-PROFINET/ETHERNET-IP
如果程序流程指針不動或者反復跳轉可以通過以上界面查看,是否是信號導致的程序沒有進入動作流程。


























