EC機器人掉臂問題處理
2025-09-08
1. 簡介
該文檔主要針對當機器人斷電后出現掉臂或者外力能夠推動機器人時排查故障指導。目前EC機器人抱閘機構采用的為機械抱閘,由彈簧、銷釘、電磁鐵組成,原理為當機器人上電時,電磁鐵吸合,抱閘打開,當機器人掉電時,電磁鐵失電,彈簧彈出,鎖住機器人,當出現掉臂或者外力能夠推動機器人時大概率為抱閘機構異常。
2. 操作流程
2-1.拆開關節
目前EC端蓋有2種型號,帶膠圈與不帶膠圈,目前最新型號均不帶膠圈,如下圖:

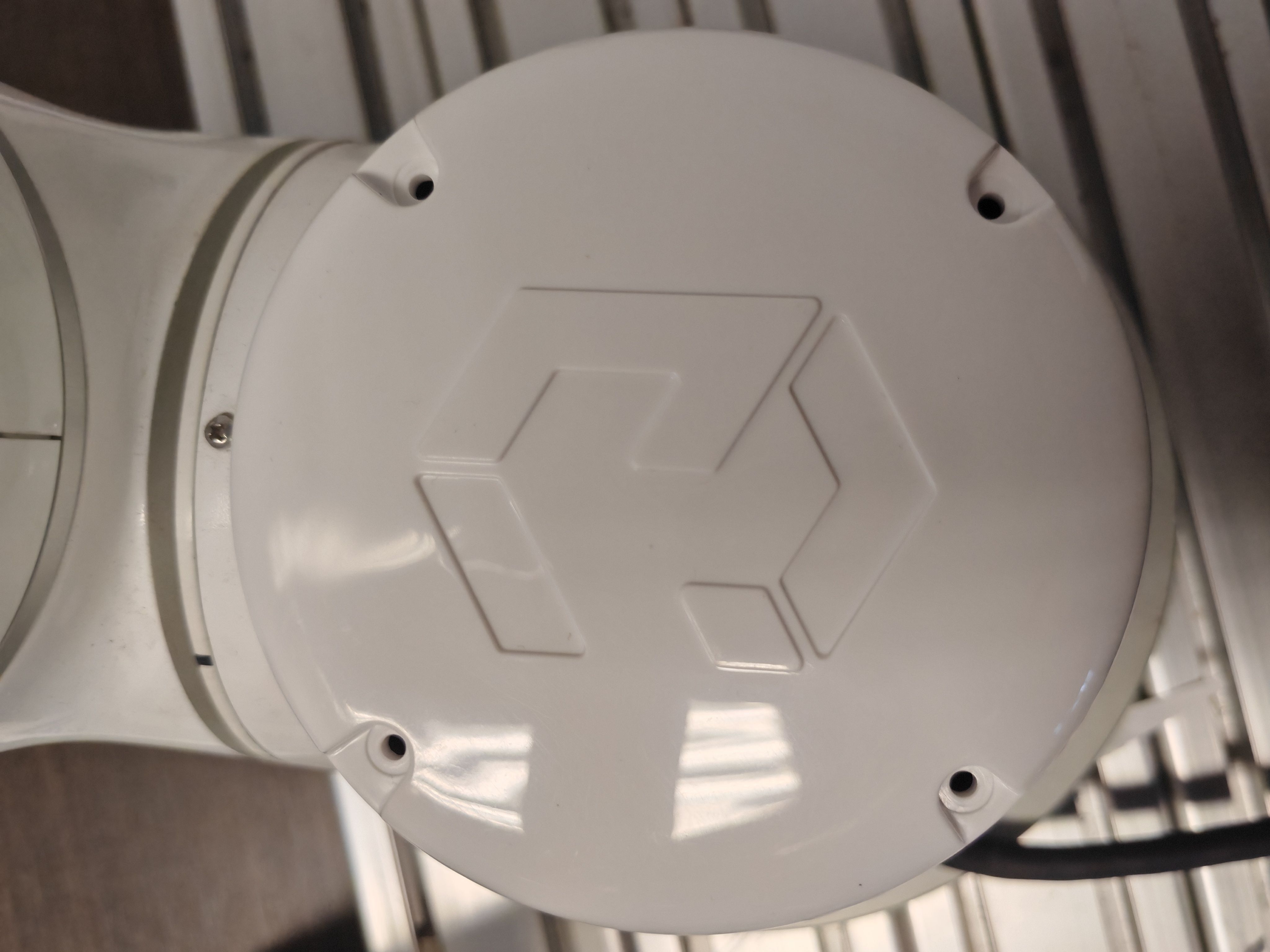
不帶膠圈的直接擰掉外面4顆螺絲即可,帶膠圈需要先將膠圈拆掉后才可看到螺絲,如下圖:

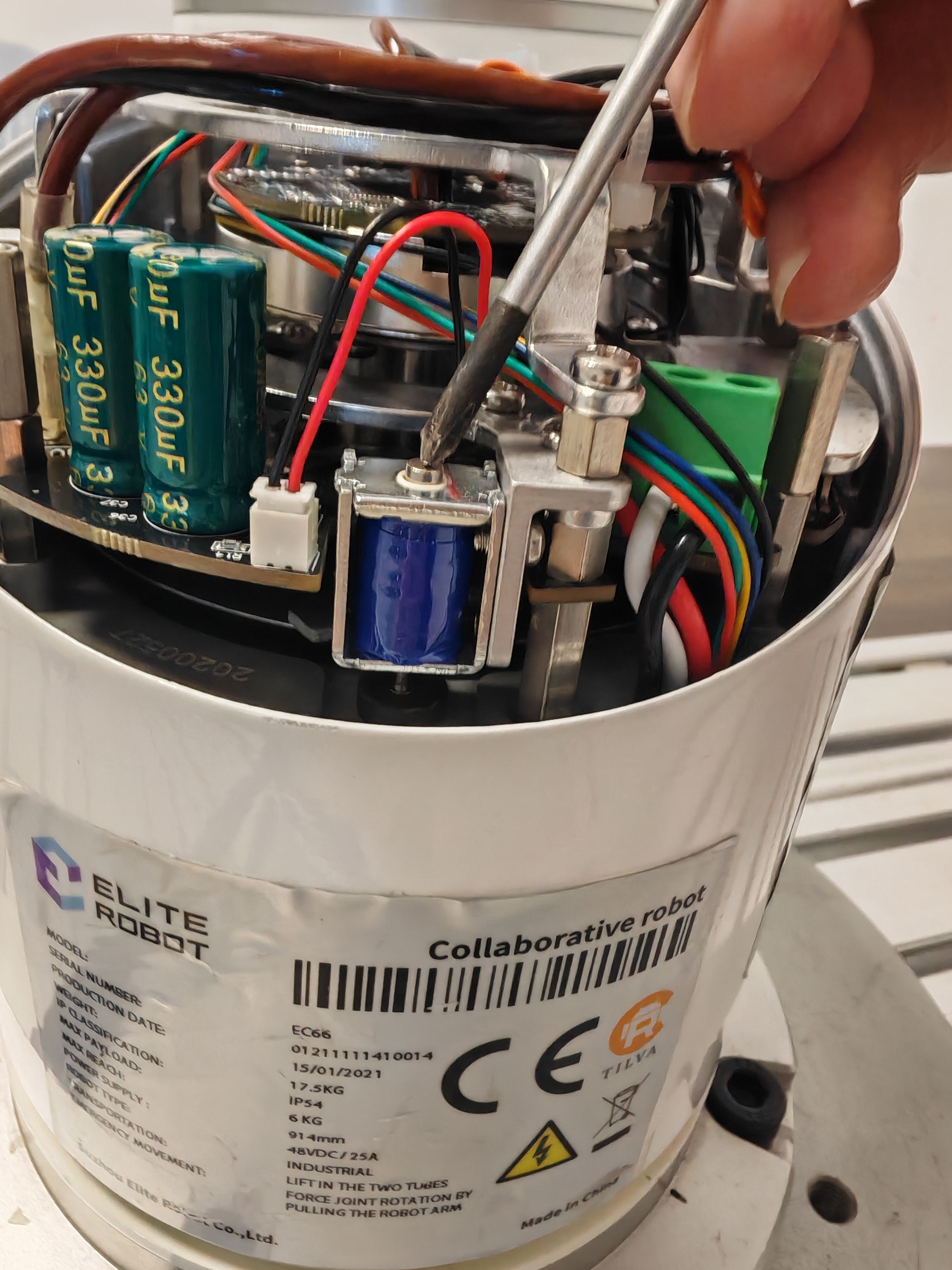
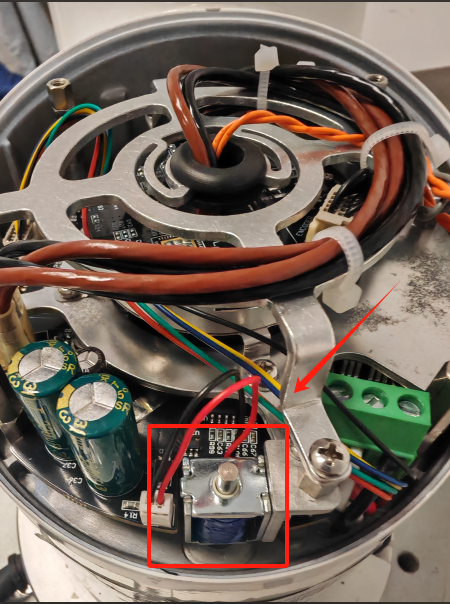
2-2.檢查抱閘
拆開端蓋前需要對機器人進行斷電,當拆開端蓋后找到抱閘機構,如下圖:
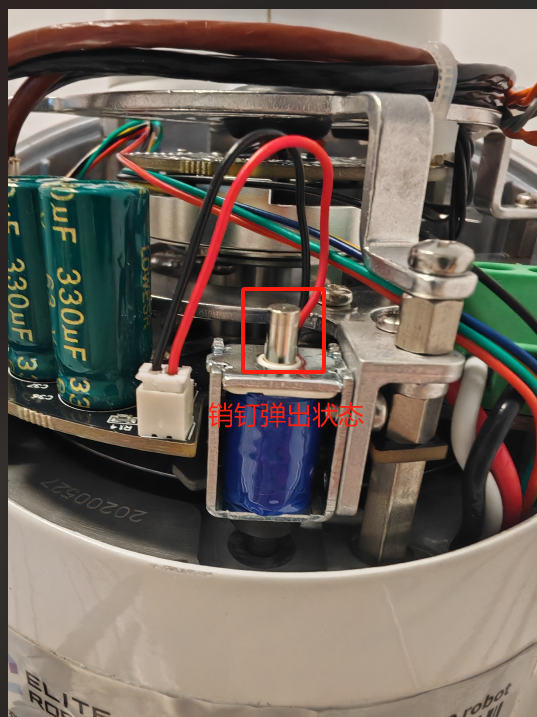
當機器人斷電后抱閘機構關閉狀態(銷釘彈起),如下圖:
當機器人本體上電后電磁鐵吸合,銷釘會處于吸合狀態,如下圖:
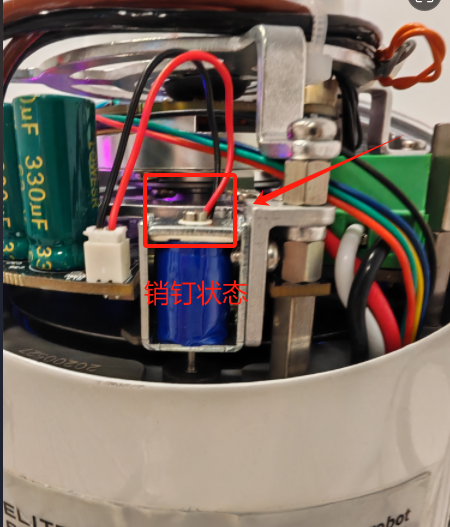
對比上圖兩種狀態,當機器人斷電銷釘未彈出時大概率為彈簧故障,當機器人上電銷釘未下落時大概率為電磁鐵故障。
3. 常見問題解答
3-1.問:如果觀察時為異常
答:可以在機器人斷電情況下手動按壓或者上撥銷釘,看看是否存在沒有完全到位,撥動銷釘時確保機器人安全,手動釋放抱閘注意機器人掉臂風險,如下圖: