
















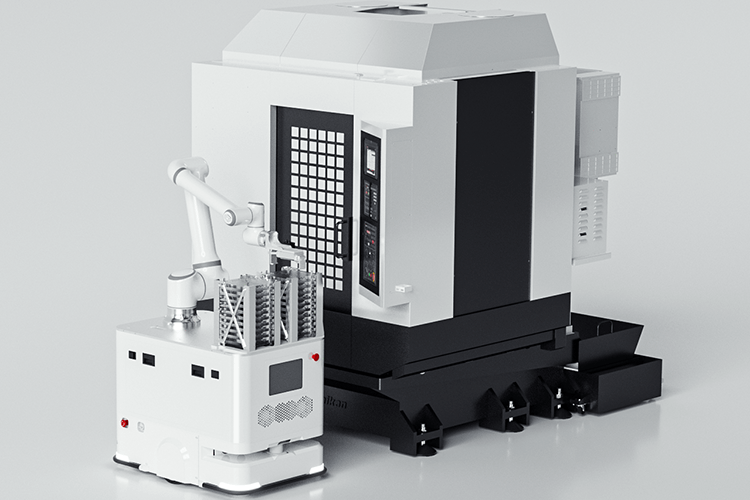
CNC自動上下料/換刀
協(xié)作機器人搭配麥克納姆輪AMR、智能控制平臺,高精度視覺定位系統(tǒng),最新調(diào)度算法結(jié)合RMS管理系統(tǒng)組成。可根據(jù)CNC機床布局智能調(diào)整運行路線,提高生產(chǎn)效率。


CNC自動上下料/換刀行業(yè)中的復(fù)合機器人
復(fù)合機器人具備自主路徑規(guī)劃能力,從待機位接收到調(diào)度任務(wù),通過全向移動,將待加工的手機外殼運輸至CNC機床前。使用自研2.5D視覺系統(tǒng)檢測工件位置,計算抓取位姿,并傳輸至機器人,使其根據(jù)視覺數(shù)據(jù)調(diào)整抓取位置,并使用電爪抓取手機外殼后精準放置至CNC機床夾具中,并取出已加工工件。加工完成后,AGV再將成品運輸至下一工序或存儲區(qū)域。多項技術(shù)的有機融合,讓艾利特復(fù)合機器人具備了前所未有的智能化水平。

艾利特復(fù)合機器人優(yōu)勢
-

 提升效率精度可達 0.02 mm,最大速度 4 m/s,將人力從重復(fù)性勞動中釋放,形成 1+1>2 的人機協(xié)同效應(yīng)。
提升效率精度可達 0.02 mm,最大速度 4 m/s,將人力從重復(fù)性勞動中釋放,形成 1+1>2 的人機協(xié)同效應(yīng)。 -
 減少傷害不受工作現(xiàn)場限制,減少員工在惡劣生產(chǎn)環(huán)境下受機械碰撞、毒氣、粉塵、高溫、噪音、強光等傷害。
減少傷害不受工作現(xiàn)場限制,減少員工在惡劣生產(chǎn)環(huán)境下受機械碰撞、毒氣、粉塵、高溫、噪音、強光等傷害。 -
 增加柔性部署靈活,操作簡單,可快速切換生產(chǎn),滿足小批量、多品種的生產(chǎn)需求。
增加柔性部署靈活,操作簡單,可快速切換生產(chǎn),滿足小批量、多品種的生產(chǎn)需求。






















